File:Force-Myography-to-Control-Robotic-Upper-Extremity-Prostheses-A-Feasibility-Study-Video 1.ogv
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (Ogg multiplexed audio/video file, Theora/Vorbis, length 19 s, 854 × 480 pixels, 747 kbps overall, file size: 1.73 MB)
Captions
Captions
Summary[edit]
| Description |
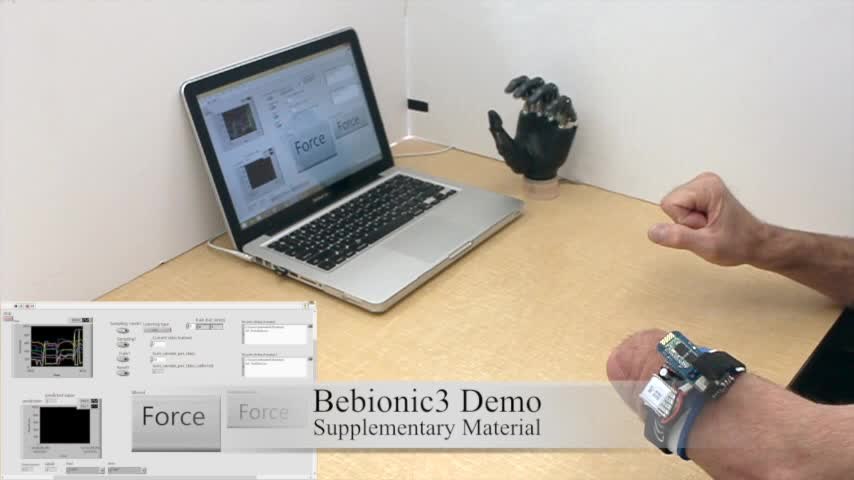
English: Demonstration video footage of the Bebionic3 being actuated using the FSR sensor strap. The protocol was repeated for three grips: 1. Open Palm Grip; 2. Force Grip; 3. Tripod Grip in the opposed thumb configuration to show control of the Bebionic3. The video shows the Bebionic3 performing the grips intended by the subject, where the FSR strap is donned on the residual limb and the sound limb is used to mirror the intention of the residual limb. Additional grip patterns are not shown due to the limitations of the available hardware.
Hardware Setup for Demonstration Video To demonstrate the feasibility of controlling a robotic prosthesis, the commercially available robotic multi-dexterous hand, Bebionic3 by Steeper Group, was used. To interface with this hand, an additional circuitry was developed to replicate the pre-existing sEMG signals recognized by most robotic prostheses. The signal produced by this circuitry replicates an open and close signal of an sEMG as well as an open–open signal to cycle through available grips. Live feedback was provided to the subject with a graphical user interface (GUI) to confirm whether the intended grip was detected properly. The GUI was developed in LabVIEW to perform real-time classification in addition to transmitting the classification results as commands (open, close, or open–open signals) to the Bebionic3 via Bluetooth. The additional circuitry consists of an Arduino ProMini microcontroller and two bipolar junction transistors (BJT) communicating with the GUI via Bluetooth. The BJT acts as a switch, one for each sEMG signal port, to create high and low impedances driven by two digital outputs from the Arduino ProMini. The FSR strap transmits sensor values via Bluetooth to LabView where the signal is processed and then classified. The classified grip command is then sent to the Arduino BJT circuit to open, close, or switch grips. The Bebionic3 has two thumb configurations, opposed and non-opposed, which is passively set in position by the sound limb. Each thumb configuration has two modes that can be cycled through with a hardware button found on the back of the Bebionic3. Each mode contains a primary and secondary grip, which can be cycled through with an sEMG open–open signal. Due to the limitations of the open–open signal, only two grips in addition to open palm may be selected actively. |
||
| Date | |||
| Source | Video S1 from Cho E, Chen R, Merhi L, Xiao Z, Pousett B, Menon C (2016). "Force Myography to Control Robotic Upper Extremity Prostheses: A Feasibility Study". Frontiers in Bioengineering and Biotechnology. DOI:10.3389/fbioe.2016.00018. PMID 27014682. PMC: 4782664. | ||
| Author | Cho E, Chen R, Merhi L, Xiao Z, Pousett B, Menon C | ||
| Permission (Reusing this file) |
This file is licensed under the Creative Commons Attribution 4.0 International license.
|
||
| Provenance |
|
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 18:36, 31 March 2016 | 19 s, 854 × 480 (1.73 MB) | Open Access Media Importer Bot (talk | contribs) | Automatically uploaded media file from Open Access source. Please report problems or suggestions here. |
You cannot overwrite this file.
File usage on Commons
The following page uses this file: