File:A telepresence robot made from scrap.jpg
Jump to navigation
Jump to search
Size of this preview: 400 × 600 pixels. Other resolutions: 160 × 240 pixels | 320 × 480 pixels | 512 × 768 pixels | 682 × 1,024 pixels | 1,365 × 2,048 pixels | 4,000 × 6,000 pixels.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (4,000 × 6,000 pixels, file size: 9.29 MB, MIME type: image/jpeg)
Captions
Captions
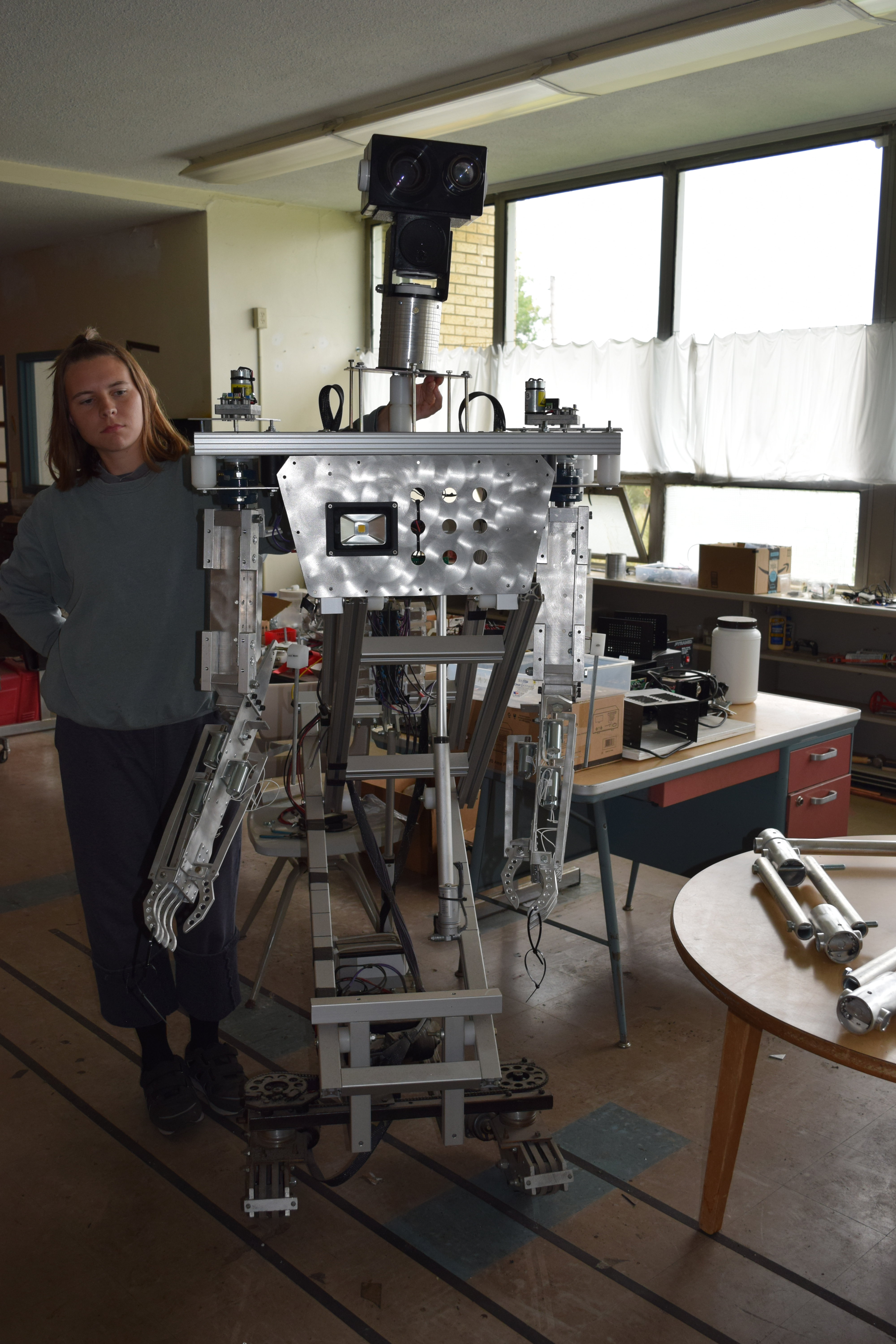
A telepresence robot made from scrap.
Summary[edit]
{kind=link}
| Description |
English: Autumn Siegel, who began her apprenticeship in Robotics as a preschooler is seen here with Quazi, a hand crafted robot for public use to help educate people of all ages. Quazi was made out of scrap and part seconds from other projects and is a low budget experiment in developing remotely operated robotics for industry, education and space applications. Quazi is the projects recycled mascot and also a unique telepresence robot that operates with a control system that is similar to those seen in anime and science fiction films. Quazi is often used for outreach programs to schools and senior centers. Quazi was designed by MRISAR’s R&D team and fabricated at MRISAR, a family owned business in North Dakota. Everything from MRISAR is designed and prototyped by two generations of 4 family members, the youngest two Autumn and Aurora Siegel, along with their parents John Siegel and Victoria Lee Croasdell-Siegel. The team goals are humanitarian and educational uses for science, art and technology. The devices created by them are unique in the fact that they are handcrafted, not mass produced. This allows the team to create across a wide range of technologies, applications and elements of science and art. The public use robotic exhibits they create for museums and science centers around the world relate to STEM and STEAM. This two generation team has even invented robotic systems for NASA.
From a technical vantage this specific device combines electromechanical and mechanical engineered elements with travel limits and Boolean logic, remotely located controls relate positioning data for the degrees of freedom. Other key elements are observations of design standards such are compensation for mechanical shock load, derating electrical, derating mechanical, derating electronic and mechanical elements, analysis of materials, weight distribution and comparisons to human arm operating degrees of freedom. The robot is also designed to change it height which has great appeal to children in the audiences during live presentations. It is a rather humorous predecessor for a serious humanoid robot project in development. More images of the creation of this and other MRISAR robotic devices can be seen at mrisar.org.The work of MRISAR’s R&D team has drawn world interest for the public-use educational robotic exhibit prototypes that they create and also for their humanitarian R&D that aims to improve the quality of life. Their work has been presented before and/or published and awarded by: the United Nations, NASA-Emhart, Stanford, Cambridge, ICORR Robotics conferences, ROMAN Robotics conferences, IEEE, Discover Awards, International Federation of Robotics, etc. The “International Federation of Robotics” annual publication on Service Robotics regularly lists MRISAR Institute of Science, Art & Robotics in at least ten categories of robotics. The publication covers major contributors in the field of robotics and within that coverage focuses on the diversity of robotics, worldwide uses for robotics, economic factors and projections. Most are industrial providers, but the publication also includes NASA and other renowned research elements that reach well beyond industrial applications. In the 2011 publication MRISAR was featured in an entire chapter. The publication picks one per year for special focus in a chapter and covers a multitude of ventures in the rest of the document. |
| Date | |
| Source | Own work |
| Author | Victoria Lee Croasdell |
Licensing[edit]
{kind=link}
I, the copyright holder of this work, hereby publish it under the following license:
This file is licensed under the Creative Commons Attribution-Share Alike 4.0 International license.
- You are free:
- to share – to copy, distribute and transmit the work
- to remix – to adapt the work
- Under the following conditions:
- attribution – You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- share alike – If you remix, transform, or build upon the material, you must distribute your contributions under the same or compatible license as the original.
| This image was uploaded as part of Wiki Science Competition 2019. |
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 10:40, 13 December 2019 | | 4,000 × 6,000 (9.29 MB) | Victoria.Lee.Croasdell (talk | contribs) | User created page with UploadWizard |
You cannot overwrite this file.
File usage on Commons
There are no pages that use this file.
File usage on other wikis
The following other wikis use this file:
- Usage on www.wikidata.org
{kind=link}