File:CSIRO ScienceImage 7581 Starbug undergoing tests in pool zoom.jpg
Jump to navigation
Jump to search
No higher resolution available.
CSIRO_ScienceImage_7581_Starbug_undergoing_tests_in_pool_zoom.jpg (448 × 313 pixels, file size: 93 KB, MIME type: image/jpeg)
Captions
Captions
Add a one-line explanation of what this file represents
Summary
[edit]{kind=link}
| Description |
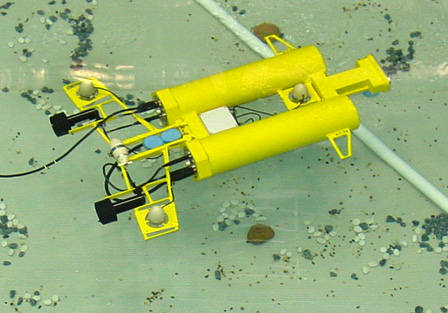
Français : Développé par le Centre CSIRO ICT dans son laboratoire Queensland, "Starbug" est un engin sous-marin miniature autonome dédié à la surveillance du milieu et des écosystèmes marins dont la Grande Barrière de Corail. Selon le Dr Matthew Dunbabin (chef de l'équipe qui a développé Starbug) «Notre vision est que des plates-formes à faible coût comme Starbug pourraient être déployées en grand nombre pour améliorer grandement les taux de collecte de données et aainsi doper la recherche sur les récif coralliens." Cet engin léger peut être exploité par une personne à partir de la rive, d'une plates-formes flottante ou de petits bateaux sans besoin de grues et autres équipements spécialisés. Starbug est l'un des premiers AUV au monde spécifiquement conçu avec un système de vision asservissant le système de navigation et de contrôle, ce qui signifie qu'il peut se passer de fil et d'opérateur English: Developed by the CSIRO ICT Centre at its Queensland laboratory, Starbug is an autonomous, miniature submarine for underwater monitoring and surveying of ecosystems such as the Great Barrier Reef. Dr Matthew Dunbabin, leader of the team that developed Starbug, says: "Our vision is for low-cost platforms like Starbug to be deployed in large numbers to greatly improve data collection rates so that reef research can leap ahead." Starbug represents a radical new design philosophy which has resulted in a vehicle that is small enough to be operated by one person from the shore, floating platforms or small boats without the need for cranes and other specialised equipment. Starbug is one of the first AUVs in the world designed specifically with vision as the primary sensor for navigation and control. This means it does not need to be tethered and does not need an operator |
| Date | |
| Source | Commons : https://commons.wikimedia.org/wiki/File:CSIRO_ScienceImage_7581_Starbug_undergoing_tests_in_pool.jpg |
| Author | User:99of9/CSIRO_template |
{kind=link}
http://www.scienceimage.csiro.au/pages/about/
Licensing
[edit]{kind=link}
This file is licensed under the Creative Commons Attribution-Share Alike 3.0 Unported license.
- You are free:
- to share – to copy, distribute and transmit the work
- to remix – to adapt the work
- Under the following conditions:
- attribution – You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- share alike – If you remix, transform, or build upon the material, you must distribute your contributions under the same or compatible license as the original.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 15:39, 28 July 2015 | | 448 × 313 (93 KB) | Lamiot (talk | contribs) | User created page with UploadWizard |
You cannot overwrite this file.
File usage on Commons
The following page uses this file:
{kind=link}